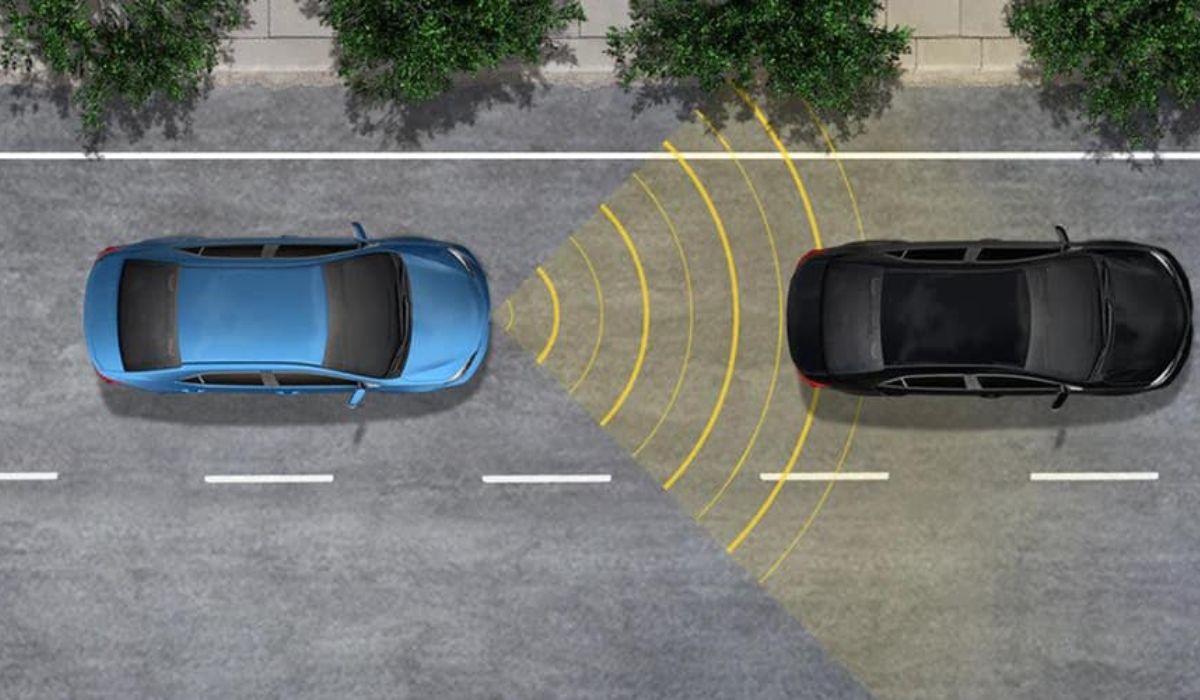
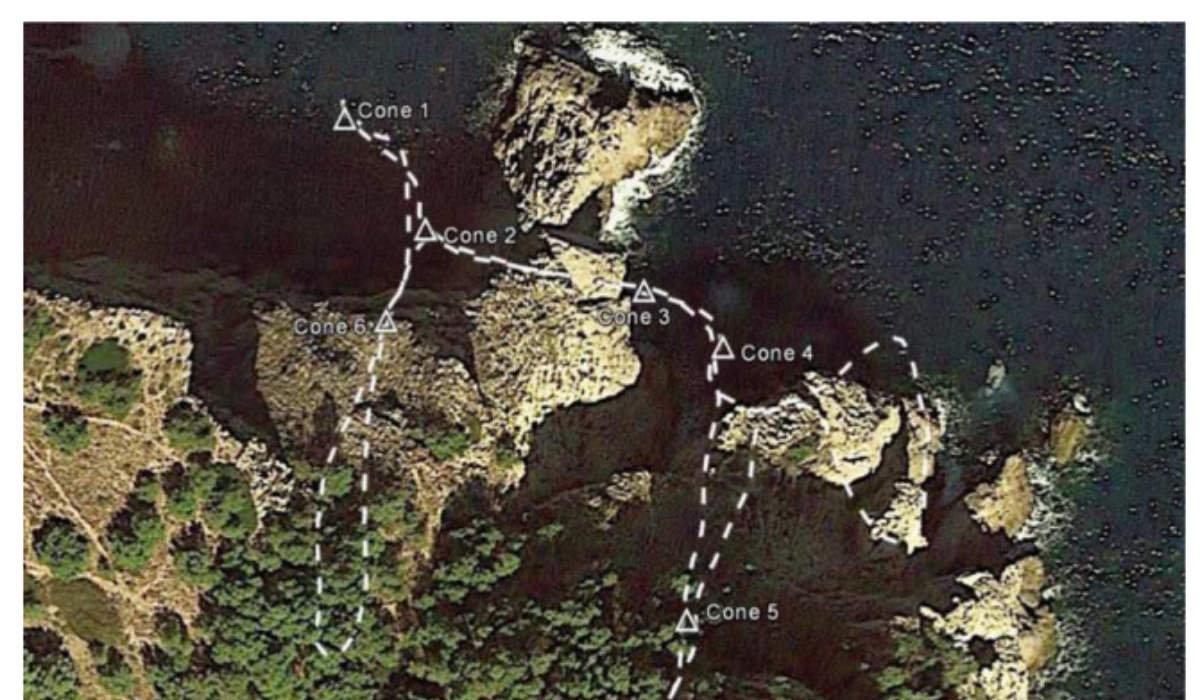
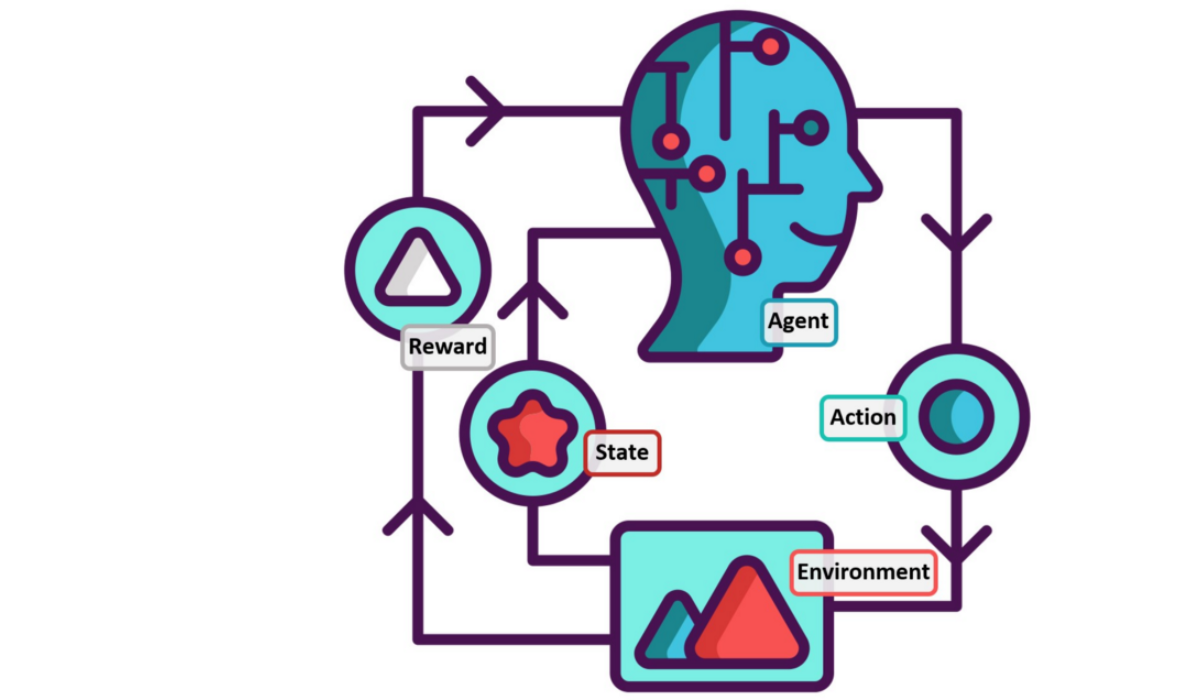
Adaptive Cruise Control EECS 461 final course project Visual-inertial SLAM EECS 568 final course project Traffic light recognition Project with Adastec corporation Optimal control for effective radiotherapy Internship project at Indian Institute of Science (IISc) Uncertainty and Disturbance Estimator Undergraduate research project at PES University Reinforcement learning & adaptive control Projects on RL and adaptive control