Visual-inertial SLAM
EECS 568 final course project
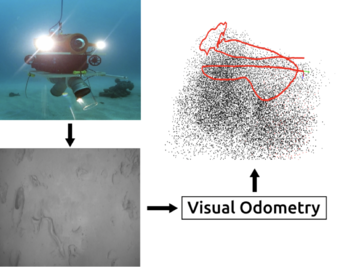
Simultaneous localization and mapping (SLAM) in underwater environments pose major challenges due to limited lighting, turbidity, lack of relevant features, imprecision of sen- sors, presence of marine currents, etc. Therefore, in this project we design a real-time image enhancement algorithm for visual simultaneous localization and mapping (SLAM) for autonomous underwater vehicles (AUV). Compared to atmospheric environ- ments, underwater environment have issues with low contrast and color distortion. Our method focuses on underwater gray- scale image enhancement for a real-world dataset by using a simplified enhancement model. In this project, the visual-inertial SLAM methods such as ORB-SLAM3 and Open Keyframe-based Visual-Inertial Odometry (OKVIS) are used. The results indicate that the enhanced images have better performance than the original images in feature points extraction and overall tracking performance.
The main contributions of this project are:
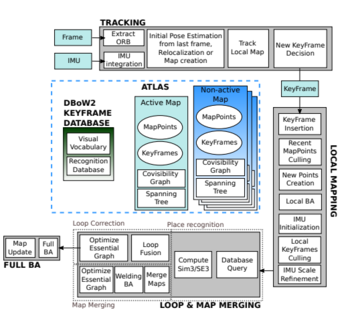
- Application and performance analysis of the recently developed ORB-SLAM3 method in underwater environments.
- Integration of real-time image enhancement pipeline within ORB-SLAM3 and OKVIS.
- Performance comparison based on absolute translational error (ATE).
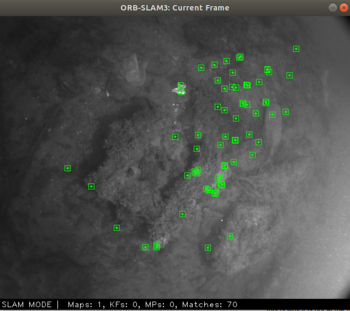
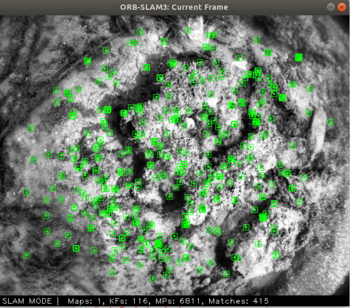
Both OKVIS and ORB-SLAM3 rely on feature recognition and matching to calculate the estimated change in state from camera frames. Therefore, increased feature matching results in reduced failures and better tracking in both algorithms. This can be seen in the below set of figures for ORB-SLAM3.
The trajectory estimation performance is evaluated based on Absolute Translational Error (ATE). The error statistics is shown in the below table for both the algotithms with/without image enhancement.
| Method | Mean | RMSE | STD |
|---|---|---|---|
| Unenhanced OKVIS | 1.782 | 2.011 | 0.932 |
| Enhanced OKVIS | 0.727 | 0.820 | 0.378 |
| Unenhanced ORB-SLAM3 | 1.867 | 2.190 | 1.144 |
| Enhanced ORB-SLAM3 | 1.873 | 2.091 | 0.929 |
Overall, it can be concluded that the image enhancement techniques can generally improve the trajectory estimation performance. Especially, in the case of OKVIS, the estimated trajectory from enhanced image yields significantly lower ATE error.
For more details, see the attched report: